4.1 Wymienić i omówić standardowe sygnały wymuszające.
Skok jednostkowy 1(t)
Przy stosowaniu tego typu sygnału założono, że czas jego narastania jest równy zeru, co jest tylko przybliżeniem sygnału rzeczywistego, jednak w wielu przypadkach jest to założenie dopuszczalne.
Impuls (funkcja) Diraca ρ(t).
Impuls Diraca jest definiowany jako impuls o nieskończenie wielkiej amplitudzie i nieskończenie małym czasie trwania oraz o polu równym jedności.
Funkcje potęgowe
Funkcje te można przedstawić w postaci
u(t)=U0t do n*1(t) n=1,2,…
Wymienione funkcje wykorzystuje się głownie do analizy układów śledzących.
Funkcja harmoniczna
Najczęściej stosuje się sygnał sinusoidalny o postaci u(t)=U0sinωt . Na tego typu sygnale bazują głównie częstotliwościowe metody analizy.
4.4 Jakie są podstawowe zasady budowy schematów blokowych?
Ogólne zasady postępowania przy budowie schematu blokowego można sprowadzić do następującej procedury :
a) dodać transformaty laplace’a układu równań różniczkowych,
b) ustalić sygnał wejściowy i wyjściowy układu,
c) na podstawie układu równań operatorowych narysować schemat blokowy.
4.5 Podstawowe metody przekształcenia schematów blokowych – omówić i podać przykłady.
znane są następujące sposoby przekształcenia (uproszczenia) schematów blokowych
- metoda przekształcenia układu równań opisujących układ. Stosuje się najczęściej na etapie budowy schematu blokowego i nie będzie szerzej analizowana.
- metoda krok po kroku poprzez kolejne dokonywanie prostych przekształceń schematu.
Pozwala zarówno przekształcić, jak i uproszczać schemat blokowy. Stosuje się ją do przekształcenia dowolnie skomplikowanych schematów. Metoda ta ma istne zalety gdyż:
- nie wymaga określenia klasy schematu, a więc ma zastosowanie do wszystkich schematów układów liniowych,
- umożliwia dokonywanie kontroli poprawności każdego kroku, a więc zapewnia poprawny wynik przekształceń
4.9 Przedstawić problem wyznaczania uchybu ustalonego
tekst
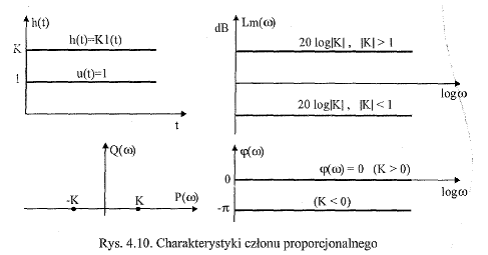
4.10 Omówić podstawowe człony dynamiczne (proporcjonalny, inercyjny pierwszego rzędu, całkujące, różniczkujące, inercyjne drugiego rzędu i opóźniający )
Człon proporcjonalny (bezinercyjny)
Równanie i transmitancja
y(t)=Ku(t) G(s)=K
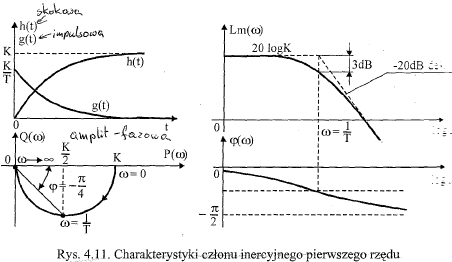
Człon inercyjny pierwszego rzędu
T*Dy(t)/(dt+y(t))=Ku(t)
G(s)=K/Ts+1
Człony całkujące
dy(t)/dt=Ku(t) G(s)=K/s=1/sTi
Człony różniczkujące
y(t)=K*du(t)/dt G(s)=Ks
Człony drugiego rzędu
G(s)=K/(T*T*s*s+2ETs+1)
Człon opóźniający
G(s)=Ke do -sTo
5.1 Wyjaśnij pojęcia: układ stabilny asymptotycznie, stabilny nieasymptotycznie, stabilny globalnie, stabilny lokalnie i niestabilny
układ jest stabilny asymptotycznie - gdy spełniony zostanie następujący warunek konieczny i
dostateczny: wszystkie rzeczywiste pierwiastki równania charakterystycznego (bieguny
transmitancji lub wartości własne macierzy stanu) lub wszystkie części rzeczywiste pierwiastków
zespolonych muszą być ujemne, czyli pierwiastki te muszą leżeć w lewej półpłaszczyźnie zmiennej
zespolonej.
Układ jest stabilny nieasymptotycznie - gdy oprócz pierwiastków leżących w lewej
półpłaszczyźnie występują:
- jeden pierwiastek rzeczywisty równy zeru
- pojedyncze pary pierwiastków urojonych,
- żaden z pierwiastków nie znajduje się w prawej półpłaszczyźnie, natomiast na osi urojonej
występują pierwiastki pojedyncze, w tym co najwyżej jeden rzeczywisty równy zeru.
Układ jest stabilny globalnie, gdy jest stabilny dla dowolnych warunków początkowych.
Układ jest stabilny lokalnie, gdy jest stabilny dla warunków początkowych leżących w pobliżu
stanu równowagi
Układ Jest niestabilny, jeśli co najmniej jeden pierwiastek znajduje się w prawej półpłaszczyźnie
zmiennej zespolonej s.
5.2 Co to jest punkt (stanu) równowagi
Stan równowagi jest to stan, do którego wraca układ po ustaniu działania wymuszenia (do stanu,
w jakim znajdował się przed zmianą wymuszenia). Punkt – nazwa w przestrzeni stanów.
5.3 Podać warunek konieczny i wystarczający stabilności asymptotycznej układu ciągłego
Układ jest stabilny, gdy spełniony zostanie warunek konieczny i dostateczny: wszystkie pierwiastki
równania charakterystycznego (bieguny transmitancji lub wartości własne macierzy stanu) lub
wszystkie części rzeczywiste pierwiastków zespolonych muszą być ujemne, czyli pierwiastki te
muszą leżeć w lewej półpłaszczyźnie zmiennej zespolonej.
5.4 Algebraiczne kryteria stabilności ciągłych układów dynamicznych
Kryteria algebraiczne pozwalają stwierdzić, czy liniowy układ jednowymiarowy jest stabilny
asymptotycznie, na podstawie wartości współczynników równania charakterystycznego., bez jego
rozwiązywania.
Warunkiem koniecznym, ale niewystarczającym stabilności asymptotycznej układu jest, aby jego
równanie charakterystyczne miało wszystkie współczynniki ao, a1,…, an jednego znaku i niezerowe.
Warunki dostateczne: (Kryterium Hurtwitza) to warunki, które powinny być spełnione, aby
Równanie charakterystyczne układu miało wyłącznie pierwiastki w lewej półpłaszczyźnie zmiennej
zespolonej s. Aby było to możliwe muszą być spełnione warunki: 1 warunek konieczny stabilności
(wszystkie współczynniki są większe od zera); 2 podwyznaczniki Δi, jako minory główne
wyznacznika Δn, są większe od zera (warunek dostateczny) Δi>0, i=2,3,…,n-1
5.5 Częstotliwościowe kryteria stabilności ciągłych układów dynamicznych
Częstotliwościowe kryteria stabilności:
● kryterium Nyquista – najczęściej stosowane, pozwala ono badać stabilność układu zamkniętego
na podstawie przebiegu charakterystyki częstotliwościowej układu otwartego, którą można
wyznaczyć zarówno analitycznie, jak i doświadczalnie, umożliwia ona także ocenę odległości układu
od graniczy stabilności.
● kryterium logarytmiczne – badania stabilności układu w oparciu o logarytmiczną charakterystykę
amplitudową i fazowa lub logarytmiczną charakterystykę amplitudowo- fazową.
5.6 Podać warunek konieczny i wystarczający stabilności asymptotycznej układu dyskretnego
Warunek konieczny i wyst. Układu dyskretnego:
Układ dyskretny jest stabilny jeśli dyskretne wartości składowych przejściowych są ograniczone
dla dowolnej chwili czasu. Jeżeli ponadto te dyskretne wartości składowych przejściowych kT->8
maleją do zera, to układ taki jest stabilny asymptotycznie.
6.1 Przedstawić istotę problemu układu regulacji
1. Synteza jest rozważana wyłącznie w kategoriach dynamiki układu(dokładność dynamiczna,
zapas stabilności, charakter lub czas trwania procesu przejściowego itp.).
Rozwiązując zadanie
syntezy należy dysponować następującymi danymi:
a) modelem matematycznym obiektu (lub wielkościami charakteryzującymi pośrednio jego
dynamikę)
b) celem sterowanie,
c) informacjami o ograniczeniach sygnałów występujących w układzie
d) wskaźnikiem jakości,
e) założeniami o typie algorytmu regulacji
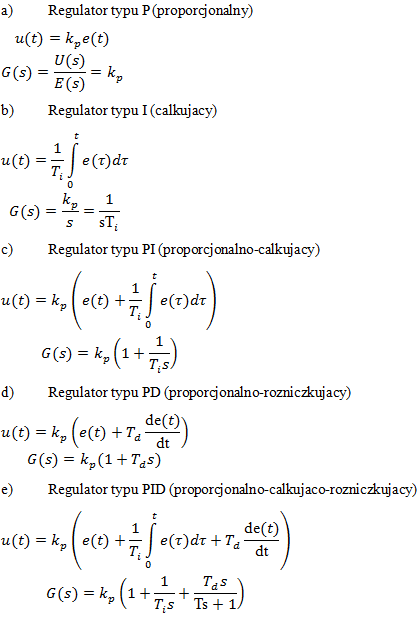
6.2 Napisać transmitancje oraz narysować charakterystyki skokowe i częstotliwościowe podstawowych regulatorów analogowych
6.4 Wymienić metody zwiększenia dokładności statycznej układu
- zwiększenie wartości współczynnika wzmocnienia
Wzrost współczynnika układu otwartego wpływa na zmniejszenie wartości uchybu statycznego. Jednak wzrost współczynnika wzmocnienia układu otwartego jest ograniczony stabilnością układu zamkniętego. Przy pewnej określonej wartości tego współczynnika w układzie zanika tłumienie i układ zbliża się do granicy stabilności. Dalszy wzrost współczynnika może spowodować niestabilność układu. Ze względu na dokładność statyczną współczynnik wzmocnienia powinien być więc jak największy, a ze względu na stabilność- możliwie mały. Występuje zatem przeciwieństwo między wymaganiami dokładności statycznej i stabilności.
- podwyższenie rzędu astatyzmu
Uchyb ustalony doprowadza się do wartości równej zeru przez zastosowanie modyfikacji, po której układ regulacji stanie się astatyczny odpowiedniego rzędu. W tym celu należy do układu wprowadzić człony całkujące, których liczbę i miejsce usytuowania dobiera się w taki sposób, aby uchyb ustalony był równy zeru. Niestety ten sposób likwidacji uchybu ustalonego ma zasadniczą wadę- wprowadzenie członów całkujących może spowodować utratę stabilności.
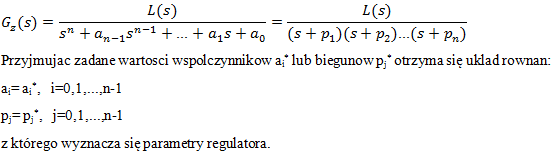
6.5 Synteza układów regulacji bazująca na rozkładzie pierwiastków równania charakterystycznego
Parametry regulatora można okreslic z warunku zadanego polozenia biegunow lub zadanej postaci transmitancji. W tym przypadku okresla się strukture ukladu regulacji (regulator w torze glownym lub w obwodzie przezenia zwrotnego) i typ regulatora (korektora), a nastepnie wyznacza transmitancje ukladu zamknietego z regulatorem o postaci:
6.6 Scharakteryzować metody czasowe syntezy ciągłych i dyskretnych układów regulacji (zasada zieglera-nicholsa)
Metoda Zieglera-Nicholasa stała się standardową procedurą doboru parametrów regulatora. W wielu przypadkach zapewnia dobra jakość regulacji. Pomimo dużej popularności tej metody otrzymywane w wyniku jej zastosowania wartości parametrów należy traktować jedynie jako pierwsze racjonalne przybliżenie. Procedura doboru wartości parametrów regulatora:
a)regulator zainstalowany w układzie regulacji należy nastawić na działanie P i zwiększyć stopniowo jego wzmocnienie kp, doprowadzając układ do granicy stabilności,
b) w stanie wzbudzonym oscylacji zmierzyć ich okres Tos oraz odczytać wartość współczynnika wzmocnienia kp=kkr,
c)zależnie od typu regulatora należy przyjąć:
dla P kp=0,5kkr
dla PI kp=0,45kkr, Ti=0,85Tos
dla PID kp=0,6kkr, Ti=0,5Tos, Td=0,125Tos
6.7 Scharakteryzować metody przestrzeni stanów syntezy układów ciągłych
Sposób rozwiązywania problemu syntezy w oparciu o metody przestrzeni stanów, także i struktura układu sterowania są uzależnione od możliwości pomiaru zmiennych stanu. W przypadku dostępności pomiarowej pełnego wektora stanu obiektu, zadanie syntezy polega na wyznaczeniu elementów proporcjonalnego regulatora wielowymiarowego, umieszczonego w torze sprzężenia zwrotnego od wektora stanu obiektu do wejścia układu sterowania. Składowe wektora powinny być tak dobrane, aby macierz stanu układu z regulatorem posiadała wartości własne o pożądanych wartościach. Natomiast w przypadku możliwości pomiaru tylko części zmiennych stanu jest niezbędne zastosowanie w układzie sterowania tzw. obserwatora stanu, który na podstawie pomiaru wejścia i części zmiennych stanu obiektu odtwarza pozostała niemierzalną część wektora stanu.
Darmowy hosting zapewnia PRV.PL